











ECE 683 Team Design Project - WI 05
Members of Professor Ozguner's ECE 683 class winter quarter will be a part of the DARPA Grand Challenge - Team ION.
ECE 683 will be held in the Intelligent Systems and Digital Control Laboratory of Dreese Labs 731. For all ECE 582 students, please read the documents listed under "Required Readings for ECE 582". In 2003, Cal Tech ran a design course similar to this 582/683 sequence. The Required Readings for ECE 582 come from their course website. All students intending to take ECE 683 in the winter should browse through the other recommended readings.
The design challenge for 683 in the winter will involve the red big-wheeled robot pictured below. Groups will design a module that may eventually be used on the ION machine for the DARPA Grand Challenge. A picture of the ION is at the bottom of the page.
|
Click here for a complete Class Description. Click here for the Class Schedule. Click here for other Class Information. Click here for an Introduction to Player/Gazebo. |

|
Final Race on March 9, 2005




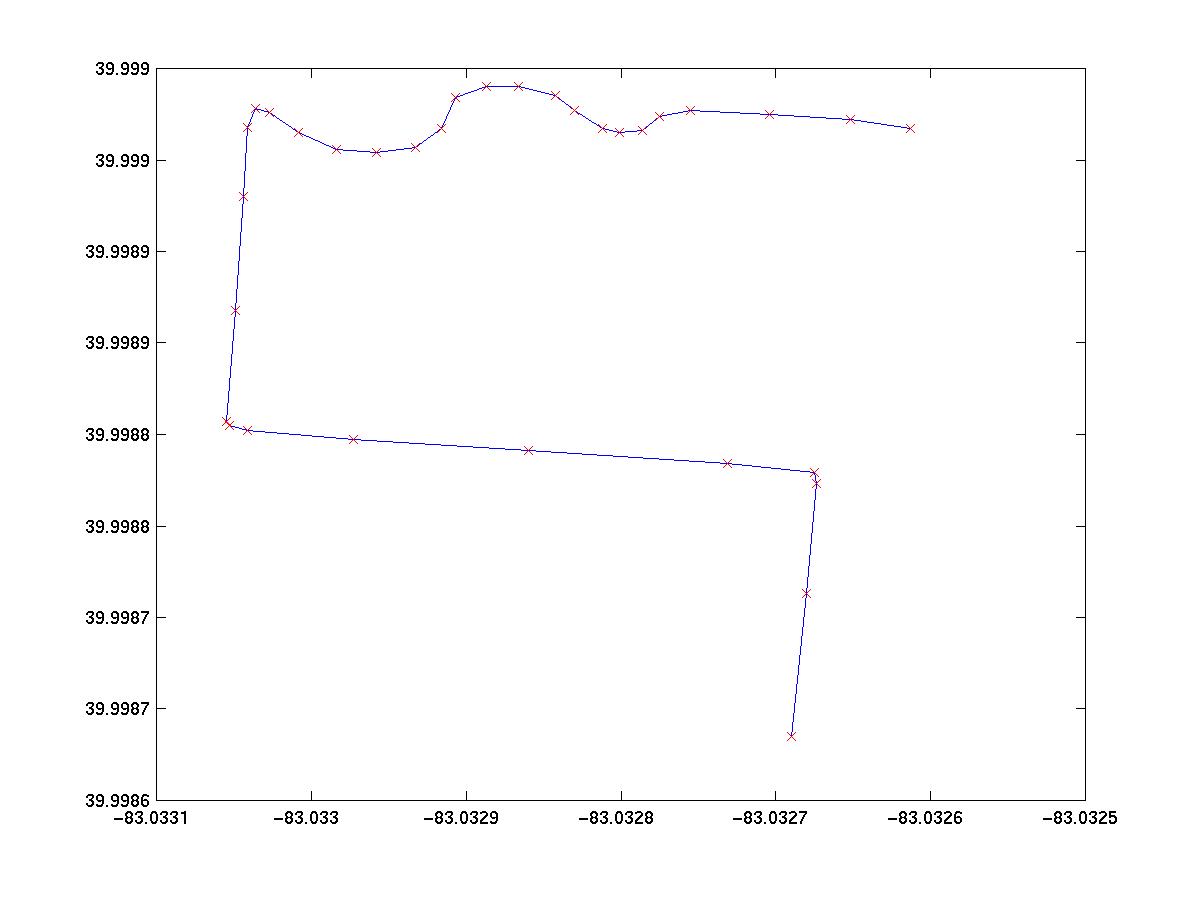
Race GPS Data
Final Presentations on March 17, 2005
| High-Level Control 1 | Vipul Gupta Matt Kabert Ryan Bokman |
| High-Level Control 2 | Liza Toher Ben Kuhlman Matt Knollman |
| Sensor Unification | Ed Weaver |
| GPS/INS Sensor Fusion | Steve Wise Justin Moon |
Review Presentations on January 26, 2005
| High-Level Control 1 | Vipul Gupta Matt Kabert Ryan Bokman |
| High-Level Control 2 | Liza Toher Ben Kuhlman Matt Knollman |
| Sensor Unification | Ed Weaver |
| Laser Clustering Algorithm | Charles Phillips |
| GPS/INS Sensor Fusion | Steve Wise |
| Fiber Optic Gyroscope | Justin Moon |
| Infrared Camera Research | Laura O'Rear Troy Wohfert |
EE582 Proposal Topics
- You can evaluate the basic (SICK) LIDAR unit. See if it is worthwhile to have two on top of each other. Pointing a little different. Check price, models. Is there anything comparable in the market. How would you use this? In fact, can you think of any other configuration of LIDAR placements? (Last year, there were people rotating one with a motor, pointing one slightly downwards from the tip of a pole, etc.)
- We have an infrared camera that we have not tested or used. One problem is we cannot tell a "rock" from a "bush". Would infrared be helpful? (Could be used together with a regular camera.)
- We would like to detect wire fences. Radar? Radar may be used for bush vs rock detection. We have Eaton-Vorad units. Anything else in the market?
- Can we design an active suspension system that we can use for the sensor package? (CMU has such a system. See their post- race evaluation report.) Specs, hardware, design? Which sensors may need more than passive damping?
- How about the control system for rotating a dish antenna? Both this and the above need a microprocessor system.
- If we are going to use cameras, we may have a problem with dust. Last year we designed an unsuccessful "film" unit to be mounted in front of cameras, then we designed an "air puffing unit" (since the truck had air.) Any other ideas?
|
Design Documents |


|