











In the Top 10 |
||
|
The Desert Buckeyes finished in the Top 10 of the 2005 DARPA Grand Challenge as ION completed around 30 miles of the course. Although the cause of why the vehicle was stopped is still unknown, there is speculation that a tank trap was lodged underneath a corner of the robot where the LIDARs were unable to see. While the Desert Buckeyes were disappointed with not finishing the entire course, the trip out to the desert was still a success after completing the qualification course 4 times and then running 30 miles in the big race.
Take a look at the new pictures from Primm in the Photo Gallery. And definitely look at the new videos from California in the Video Gallery. | ||
Down But Not Out |
||
|
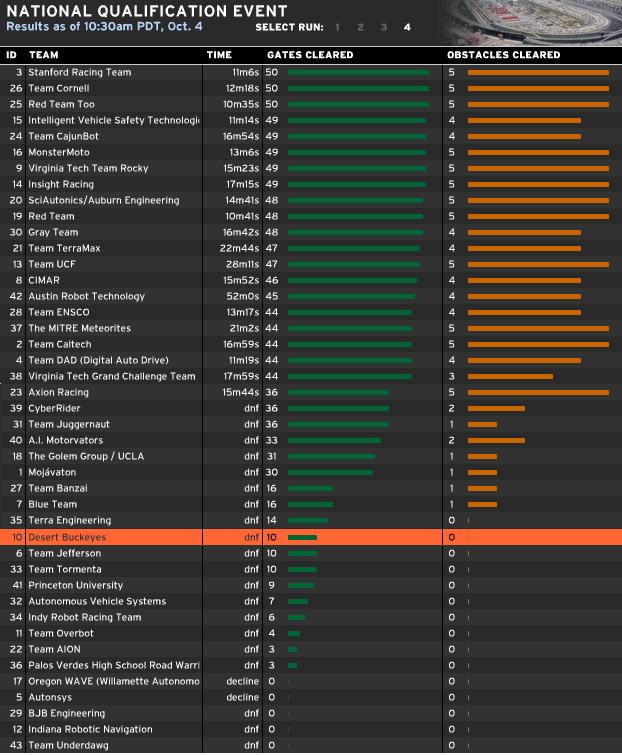
The Desert Buckeyes had a scare on Monday as the ION came out of the tunnel and headed towards the side barriers. After three successful runs, the ION had some mechanical problems with the steering controller and did not complete its fourth run. However, after a Monday evening tune-up, the ION came out of the gates like new on Tuesday, completing its fifth run in a time that bested its personal record. The Desert Buckeyes are waiting to here whether or not the ION has qualified for the big race in Primm, NV.
Check out the NQE Standings 4 to see the list of the Round 2 Run 2 rankings. Also, take a look at the new pictures from California in the Gallery. | ||
One Good Round Deserves Another |
||
|
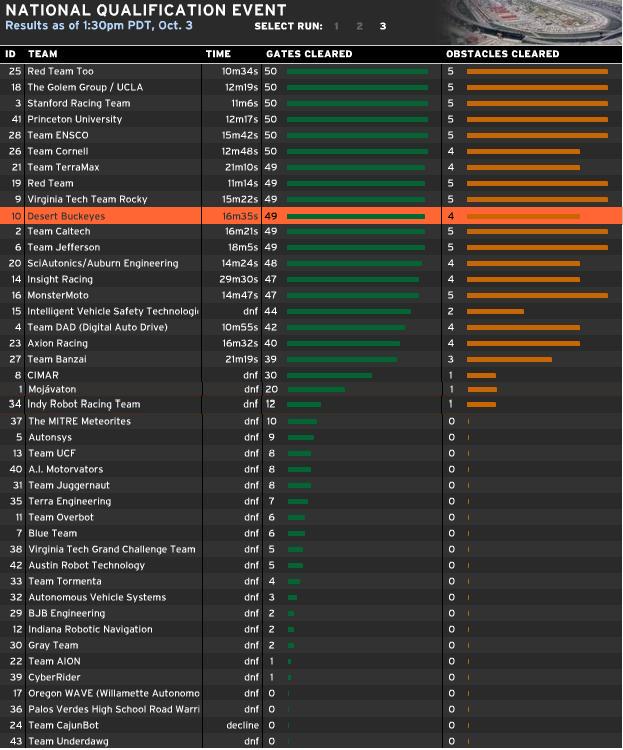
Round 2 has started off where Round 1 had ended. The course has changed slightly, but that hasn't slowed down ION. The Intelligent Off-Road Navigator has broken its individual record and completed the NQE course in under 17 minutes, in spite of the Round 2 course being slightly longer than Round 1. The ION successfully passed through 49 of the 50 gates (for a total of 148 out of 150 gates), while only slightly bumping into one obstacle. It is estimated that Run 2 of Round 2 will be held late Oct. 3rd or early Oct. 4th.
Check out the NQE Standings 3 to see the list of the Round 2 Run 1 rankings. | ||
Desert Buckeyes Go "Nuts" in Round 1 |
||
|
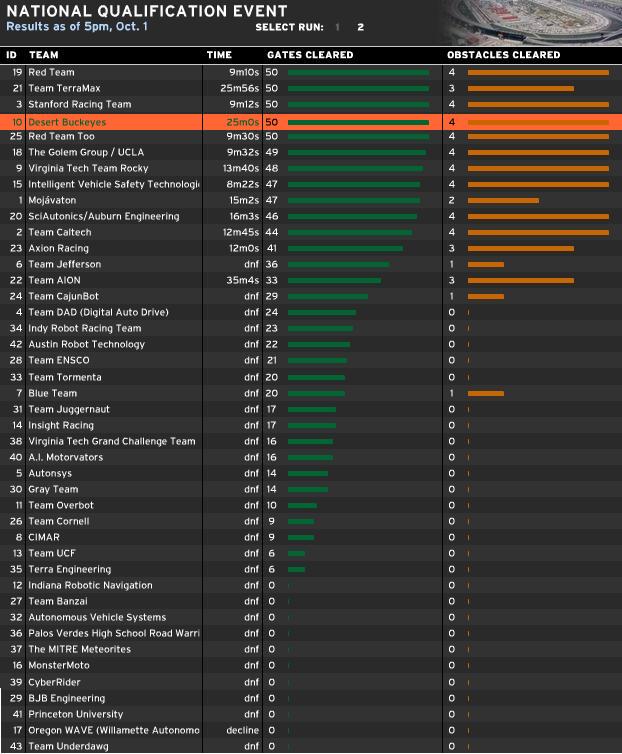
Round 1 has been labeled a success for the Desert Buckeyes. During our first run on Sept. 29th, we cleared all 4 obstacles while passing through 49 of the 50 gates in 21m3s. This accomplishment put us in the third spot of the NQE rankings. Our second run on Sept. 30th proved to be almost as successful. The ION passed through all 50 gates and avoided all 4 obstacles, but did slightly brush one of the boundaries. And despite increasing the average speed of the vehicle for the second run, the track time increased to 25m because of the IONÆs slow robotic motion that it uses to avoid tricky obstacles.
Check out the NQE Standings 1 to see the list of the Round 1 Run 1 rankings. Check out the NQE Standings 2 to see the list of the Round 1 Run 2 rankings.
| ||
WE ARE IN!!! |
||
| The Desert Buckeyes have been selected as Semi-Finalists to the 2005 DARPA Grand Challenge! Read the Official Press Release! Also check out the Ohio State Press Release! | ||
Practice, Practice, Practice |
||
 |
||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Team Desert Buckeyes

What is the DARPA Grand Challenge?
In March 2004 DARPA conducted a challenge for fully autonomous ground vehicles through a course between Los Angeles and Las Vegas in the fastest time and in less than 10 hours. An award of $1 million was to be granted to the team that fielded the first vehicle to complete the designated route. The course was disclosed to entrants two hours before the race, in terms of over 2000 way-points. Nobody won. The Grand Challenge will be repeated in October 2005 with a $2 million prize.



What is TerraMax?
 |
TerraMax was the intelligent off-road vehicle that OSU developed for an Oshkosh Truck for the 2004 Grand Challenge. Of 106 applicants, it went the 6th furthest. OSU staff and students developed algorithms and software for: |
What is ION?

|
ION is the candidate vehicle that OSU students and staff are considering for the 2005 Grand Challenge. As in 2004, we will provide for drive-by-wire capability to control the steering, throttle, and brakes. Various sensors, including multiple digital, color cameras, LIDARS, sonars, Radar, GPS and Inertial Navigation Units may be mounted. Our software, based on the experience of 2004, will be running on multiple computers. |

| Added ION video |
09/06/05 |
| Added ION Practice pictures |
08/16/05 |
| More pictures added |
05/18/05 |
| Added photos to the gallery |
03/09/05 |
| Updated Vision page |
03/03/05 |
| Updated Radar page |
03/03/05 |
| Added ECE683 Presentations |
02/06/05 |
| Added two videos of small robots to the Simulation & Testing page. |
02/02/05 |
| Added ECE 683 participants to the People page |
01/28/05 |
| Added Introduction to Player/Gazebo |
01/10/05 |
| Added more OSU participants to the People page |
01/11/05 |
| Added Sponsors to the Partners page |
01/11/05 |
| Created Contacts page |
01/11/05 |
| Created Technologies page |
01/11/05 |
| Added to Simulation & Testing |
01/11/05 |