Toyota InfoTech: Requirements For Wireless Communication Systems
For Automated Driving
- Formulation of needs for cooperative perception/maneuvering with
respect to defined motion scenarios
- To which distance, with how much delay, and how reliably the sensory information must be shared? Which parameters need to be exchanged between the cars?
- How are the requirements (range, delay, reliability) affected by the data format?
- Sharing of raw sensory data
- Sharing of the occupancy grid
- Sharing of the basic information:
List of properties for each detected object or discrepancy from existing map:
type, position, size, heading, speed, acceleration…
- From the standpoint of system mechanics and control algorithms, what are the requirements which provide smooth and safe operation?
- Communication range
- Throughput/goodput
- Delay and jitter
- Reliability
- How are the scenarios affected by a mixture of fully automated, partially automated, and manually driven cars?
- Analysis of the value of shared information
Cooperative Perception
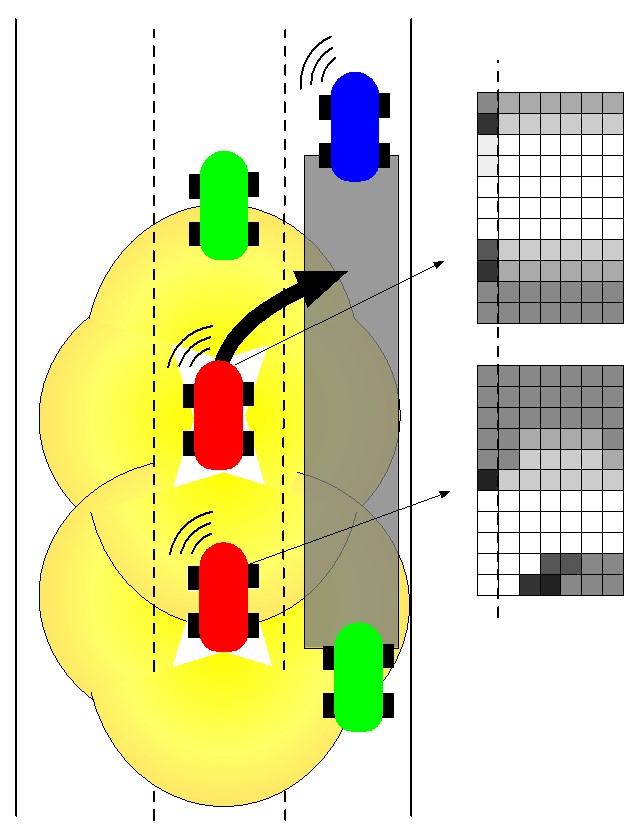
- Used local grid mapping and shared them among the vehicles in order to
get the negative information regarding to lane that autonomous
vehicles move to.
- Mixed traffic environment for different penetration rate of vehicles
with proposed local grid map fusion.
- Decision for the lane change can be made by assigning different utility
functions and the confidence of the grid map can conclude us to make decision.
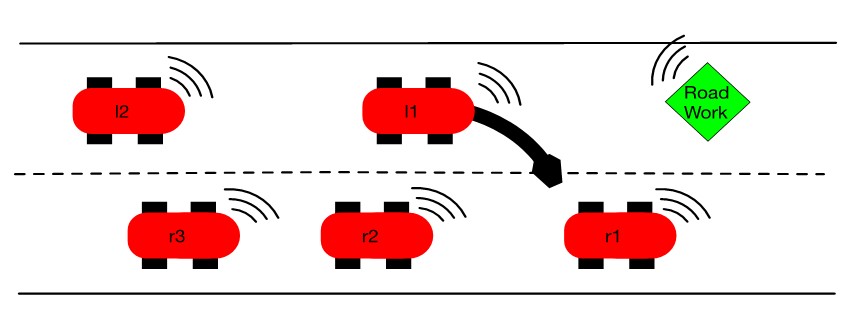
Coooperative Maneuvering
- From distributed control perspective the system is modeled as CACC platoon.
- Communication for collaborative maneuver starts with negotiation
between vehicles. In order to asses the requirements such as communication
range, throughput, delay and reliability for the communication from the
standpoint of the control algorithms, we have simulated the lane change
maneuver under different communication degradation of the communication.
- Quantitative approach is taken to evaluate the quality of the
inter-vehicle communication for safety application in the context of
highway scenarios.