VISION: A network of human- driven, semi-autonomous and fully autonomous cars moving in a transportation network in a safe and efficient way.
OBJECTIVE: to establish the fundamental principles of a network of Cyber-Physical Systems, specifically human-driven, semi-autonomous and fully autonomous cars moving in a transportation network in a safe and efficient way. The intent is the development of:
- A framework establishing a "language" to describe rules and conditions of interactions between autonomous and human-controlled systems, focusing on roadway transportation as the application area
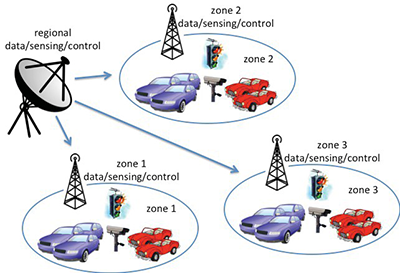
- Hierarchical design architectures to address scalability concerns
- Testable and verifiable solutions and investigation of performance through semi-virtual environments and scenarios
This project draws on prior expertise at OSU in the design of autonomous vehicles, coordination, real-time computation and communication, control, security and human behavior. Aspects of system description and verification will be further investigated with the Arizona State University researchers. To test the entire range of developed architectures, tools, methods, algorithms and software. We will use both an indoor testbed with smaller, low-cost wheeled robots and design full-scale, outdoor tests with our experimental vehicles.
The intellectual merit of this research derives from the intrinsic significance of fundamental research leading to safer vehicles and efficient collaborative driving on roadways for the well-being of the US economy, the nation’s transportation infrastructure. The collaborative framework to achieve semi-autonomous operation will be hierarchically structured to enable scalability. Through application of hierarchical architectures, the proposed research will enable a generic structure, mathematical foundations, and related design procedures and guidelines to be available for a range of cyber-physical systems. Real-time performance and security investigations for communication and coordination, will similarly affect a class of applications wider than the vehicular autonomy that is focused on in this study. The proposed research track on verification techniques involving both semi virtual tests and mathematical proofs of safety through model checking will expand the knowledge base on cyber-physical system verification.