

OSU Facilities and Resources
Experimental Vehicles
2007 ACT Urban Mixed Traffic Autonomous Vehicles
- Lane tracking
- Car following
- Intersections and traffic circles
- Passing
- Obstacle Avoidance
- Parking
- Dynamic route planning
2005 ION Offroad Autonomous Vehicle
2011 Accord Semiautonomous Networked Vehicle


Traffic Data Collection Vehicle
Indoor Robotic Testbed
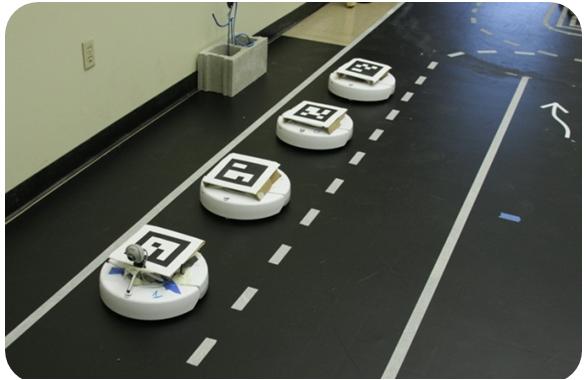
The OSU CITR indoor testbed consists of several families of ground autonomous robots, including ActivMedia Pioneer 3-ATs, iRobot Creates, and several locally constructed robots, as well as OSU-built small automated electric helicopters. An image processing based virtual GPS system, using encoded tags, provides position and orientation information for all robotic assets with an unobstructed view of the ceiling. Various wireless interfaces provide communications with bench-top computers and the virtual GPS system. The robots are equipped with a variety of sensors, including scanning laser range finders, image acquisition and processing, and ultrasonic sonar sensors. The lab floor is a removable vinyl film containing an urban road network, and can be fitted with mock buildings, obstacles, bridges, and overpasses.
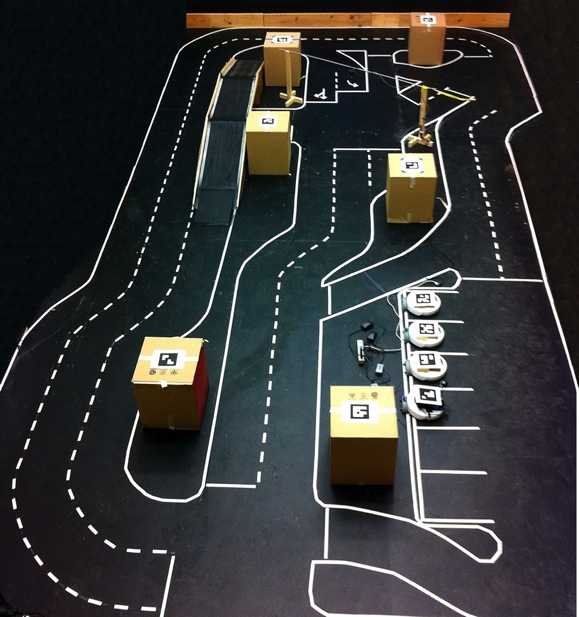
- Simulate -> Lab Verification -> Road Vehicle Verification
- Coordination, routing, control, communication, and sensing studies on small-scale road network
- Ten iRobot Create mobile robots with onboard control, sensing, and communication hardware
- Overhead tracking equipment to emulate GPS
- Vehicle-to-infrastructure communication from traffic lights
- Virtual sensor capabilities through coordinated simulation

Approximately 700 square feet of space is currently available for robot operations, along with adjacent space for computer, bench, and repair facilities. Some indoor testbed capabilities can be coupled with larger, outdoor robotic vehicles and UAVs. Finally, the software interface for the robots is compatible with a 3-dimensional simulation environment. Sensor fusion, low-level control, world model database, and ground station modules were also developed by OSU to provide a fully functional in-house stack for the indoor testbed.
Denso Foundation V2X DSRC Laboratory
- 12 Denso WSU 802.11p/WAVE DSRC radio units
- 3M (Sirit) Multichannel DSRC Packet Sniffer
- 900 MHz COTS Modems for vehicle testing and communications
- Novatel RTK Basestation
CITR Driving Simulator



- RTI benchtop simulator with 3 displays
- Software compatible with OSU Driving Simulator Lab
- Driver behavior analysis
- Driver-Vehicle interactions research
- Driver response to ADAS
- Distraction response
OSU Driving Simulation Laboratory

CAR-West Facilities

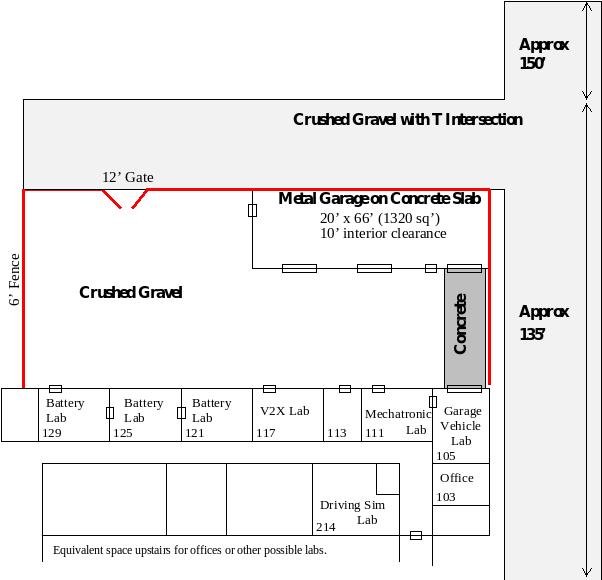
OSU Center for Automotive Research (CAR) has expanded into space in the old (rear) building at the Electroscience Laboratory (1320 Kinnear Road).
- Control and Intelligent Transporation Research (CITR) and Battery Lab operations have moved to the new location
- Providing increased space for specialized CITR efforts like the driving simulator and the V2X lab
- New garage structure for vehicle work and possible future testbeds
- Scheduled for occupance September 2013/Summer 2014
Vehicle Testing Facilities
Transportation Research Center (TRC) in East Liberty, OH- Safe and highly controlled tests at different speeds with professional driver and technician support

Low speed initial tests at Ohio State campus locations


Traffic and V2X/Network Simulators
SumoCommunication Performance: Physical layer, MAC, and Network layer performance modelled, simulated, and validated with real-world experimental data